


 今日熱搜
今日熱搜



驅動器是一種具有可控變形能力的器件,也是微型機器人的“心臟”。清華大學科研團隊最新研製出一種薄膜狀的微型驅動器,可像“變形金剛”一般讓微型機器人實現連續形狀變化且“鎖定”其特定動作形態,提升其環境適應能力。
研究人員表示,利用此驅動器以及團隊構建的一種“搭積木”式的設計方法,製備出了目前已知世界最小、最輕的微型無線陸空兩棲機器人,其體長為9釐米、重25克。該成果18日晚在線發表於國際權威期刊《自然—機器智能》。

讓機器人不僅能做走、跑、跳、飛、爬等動作,還能將任意形態隨時固定,是機器人應用場景多元化的關鍵因素。據悉,目前5釐米以下的小尺度驅動器,通常難以同時實現連續的形狀變化與構型鎖定,這嚴重制約了具有多種運動模式的機器人向微型化與無線化發展。
基於材料與結構協同設計方法上的創新,清華大學航天航空學院、柔性電子技術國家級重點實驗室張一慧教授課題組自主研製出最小至幾毫米的微型驅動器,作為“可變形外骨骼”可用於集成傳感器、電機等功能元器件,進而構建複雜的機器人系統。
“要讓機器人又小又輕、無線控制,還要具備複雜形態切換能力非常難。”張一慧說,新型驅動器具有優異的變形能力和鎖定能力,通過電控制,可做到連續變形至任意狀態並將形態“鎖定”——這是以往小尺寸驅動器很難實現的。利用此驅動器組裝成的微型陸空兩棲機器人通過變形,可跑、可飛,動作靈活,地面運動速度最高可達每秒1.6米。
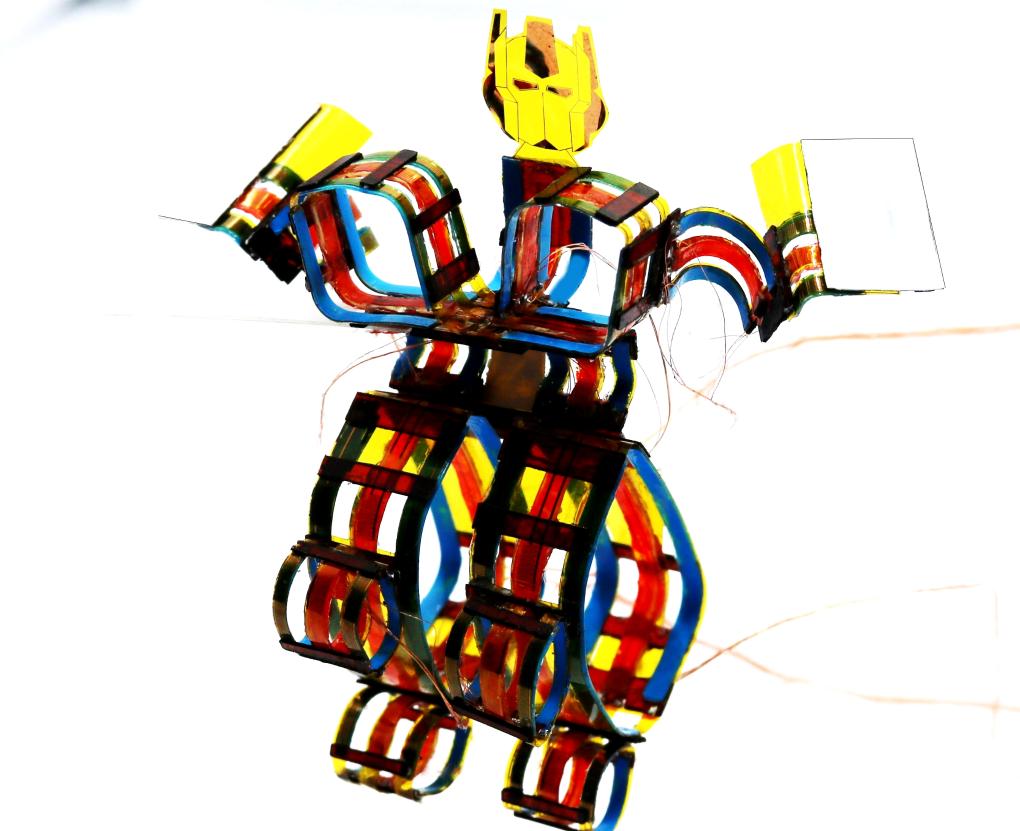
此外,團隊還用10多個驅動器製出一款高4.5釐米、重僅0.8克的迷你版“變形金剛”。
張一慧表示,此次成果為微型機器人研發應用提供了新的思路和路徑。未來,這種微型陸空兩棲機器人可應用於設備故障診斷及檢修、地質及文物勘探等場景,替代人類執行複雜危險環境下的多種任務。






 查看更多
查看更多














